
Robotic Telesurgical System for Laparoscopy
Robotic motion planning, perception, and control algorithms for automating subtasks in surgery.
•
1 min read
Robotic motion planning, perception, and control algorithms for automating subtasks in surgery.
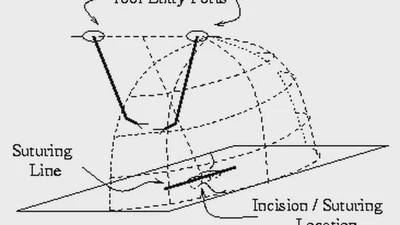
Method to evaluate the kinematic ability of surgical robotic manipulators to perform suturing and knot tying.
Bilateral force feedback teleoperation controller design for haptic exploration and telemanipulation of soft environments.
Development of virtual environments for in surgical training simulators.
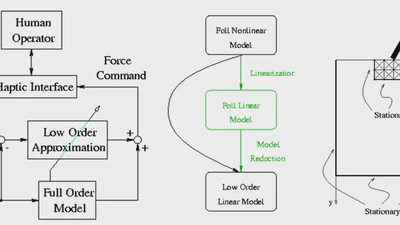
Development of a multi-rate simulation scheme for haptic interaction with virtual environments.
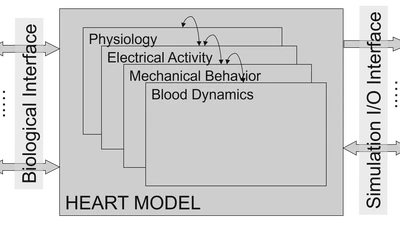
Organ level modeling and simulation for surgical applications.
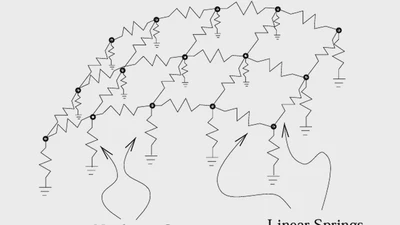
Modeling the dynamics of human-thigh for development of an echography simulator with force feedback.
Modeling of robot-environment contact and force control as a hybrid-system.