Bilateral Force Fedback Teleoperation
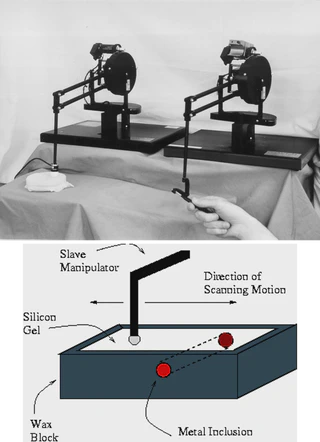 Bilateral teleoperation experiment setup.
Bilateral teleoperation experiment setup.Goals
Minimally invasive surgery (MIS) can be of great benefit to the patient, but places great demands on the surgeon’s perceptual motor skills. Teleoperation technology can restore some of the lost dexterity and sensation in MIS.
In this research project we studied teleoperation controller design for haptic exploration and telemanipulation of soft environments. Our research had three components: (a) experiments to determine human capability to discriminate changes in compliance displayed through a haptic interface, (b) analysis and design of teleoperator control algorithms to optimize the transmission of compliance, (c) experiments to evaluate operator performance using teleoperation systems in a task more representative of surgery, complementing the control design procedure. The paradigm used in all the cases is the ability to detect a change in compliance of a surface, as would occur due to a lesion or vessel embedded in soft tissue.
As part of this research project, I have proposed a new measure for fidelity in teleoperation which quantifies the teleoperation system’s ability to transmit changes in the compliance of the environment. This sensitivity function also incorporates the experimentally measured frequency dependent compliance discrimination sensitivity of the human operator. The bilateral teleoperation controller design problem was then formulated in a task-based optimization framework as the optimization of this metric with constraints on free space tracking and robust stability of the system under environment and human operator uncertainties. We have also used this analysis to evaluate the effectiveness of using a force sensor in a teleoperation system.
