Development of an Echography Simulator with Force Feedback
 Echography simulator with force feedback.
Echography simulator with force feedback.Goals
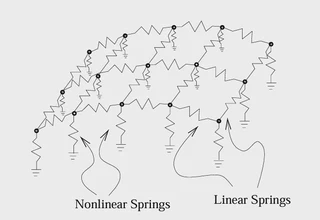
While visiting the SHARP Group at the INRIA Rhone-Alpes Research Center in Grenoble, France, I worked on modeling the dynamics of human-thigh for development of an echography simulator with force feedback. We have developed a mass-spring model of the dynamics of a human thigh based on real data acquired. Using a force sensor mounted on a robot arm the deformation of the thigh with respect to an external force is measured. The stress-strain curves we obtained exhibit a strong non-linearity due to the incompressibility of the human tissue. Hence, we propose a two-layer model of the thigh using both linear and non-linear visco-elastic springs to simulate the observed behaviour. The parameters of the springs are estimated using a least-squares minimisation method.
For further information, please refer to my publications.
