Robotic Telesurgical System for Laparoscopy
 UC Berkeley / UC San Franciso robotic telesurgical workstation for laparoscopy.
UC Berkeley / UC San Franciso robotic telesurgical workstation for laparoscopy.Goals
Minimally Invasive Surgery (MIS) is a revolutionary approach in surgery. In MIS, the operation is performed with instruments and viewing equipment inserted into the body through small incisions created by the surgeon, in contrast to open surgery with large incisions. This minimizes surgical trauma and damage to healthy tissue, resulting in shorter patient recovery time. Unfortunately, there are disadvantages due to the reduced dexterity, workspace, and sensory input to the surgeon which is only available through a single video image.
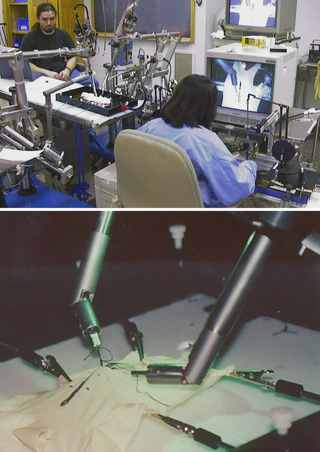
In this joint project between the Robotics and Intelligent Machines Laboratory of the University of California, Berkeley (UCB) and the Department of Surgery of the University of California San Francisco (UCSF), a robotic telesurgical workstation for laparoscopy was developed. Our Robotic Telesurgical Workstation for Laparoscopy was a bimanual system with two 6 DOF manipulators instrumented with grippers, controlled by a pair of 6 DOF master manipulators.
With the telesurgical workstation, the conventional surgical tools are replaced with robotic instruments which are under direct control of the surgeon through teleoperation. The goal is to restore the manipulation and sensation capabilities of the surgeon which were lost due to minimally invasive surgery. A 6 DOF slave manipulator, controlled through a spatially consistent and intuitive master, will restore the dexterity, the force feedback to the master will increase the fidelity of the manipulation, and the tactile feedback will restore the lost tactile sensation.
My main roles in this project were the analysis of the manipulator, control design, tissue modeling, and evaluation of the system.
For more information please visit the UC Berkeley Medical Robotics Group and Intelligent Machines and Robotics Lab web pages, and my related publications.
Highlights
Here you can find a video of the system in action. You may need a DivX codec to view the video.
