Haptic Interfacing to Virtual Environments
Aug 1, 2001
·
1 min read
 Multi-rate simulation for haptic interfacing to virtual environments.
Multi-rate simulation for haptic interfacing to virtual environments.Goals
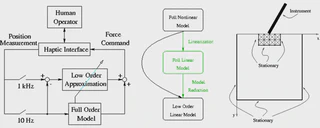
Haptic interaction is an increasingly common form of interaction in virtual environment (VE) simulations. This medium introduces some new challenges. As part of my research, I have introduced a multirate simulation scheme which uses a local linear approximation to address the problem arising from the difference between the sampling rate requirements of haptic interfaces and the significantly lower update rates of the physical models being manipulated in surgical simulators.

Authors
Nord Professor of Engineering
M. Cenk Cavusoglu is the Nord Professor of Engineering in Electrical, Computer, and Systems Engineering at Case Western Reserve University. He is also the director of the Medical Robotics and Computer Integrated Surgery (MeRCIS) Laboratory. His research focuses on medical robotics, haptics, human–machine interfaces, and control, spanning control, mechanism, and system design to AI-assisted interventions. He is a Fellow of AIMBE. He has led 12 federally funded projects as principal investigator, with a total budget over $12.6M, and has served on editorial boards for leading robotics and mechatronics journals. His work advances safe, precise, and intelligent robotic systems for surgery and image-guided interventions.