Workspace Analysis of Robotic Surgical Manipulators
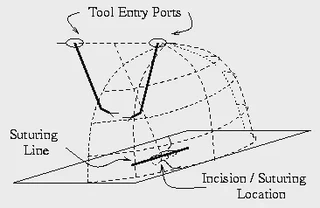 Robot workspace diagram.
Robot workspace diagram.Goals
As part of my research on the robotic telesurgical system for laparoscopy, I have also developed a method to evaluate the kinematic ability of surgical robotic manipulators to perform the critical tasks of suturing and knot tying. The method uses open (i.e., non-MIS) surgical suturing motion data collected from experiments done with expert surgeons. One oft he goals of robotic telesurgical systems is to enable the surgeons to use open surgical techniques for suturing and knot tying in the MIS setting by having robotic tools with sufficient dexterity and a suitable user interface. Therefore, open surgical suturing motion data is used in the analysis. This way, it is possible to evaluate if the system can be used with the natural open surgical techniques, without the need of learning new ways to perform these tasks.
