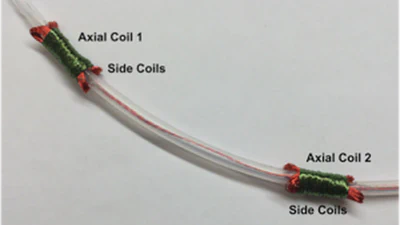
MRI-Guided Robotic Catheter
MRI-guided robotic catheters for intravascular cardiac procedures.
•
1 min read
MRI-guided robotic catheters for intravascular cardiac procedures.
Robotic motion planning, perception, and control algorithms for automating subtasks in surgery.
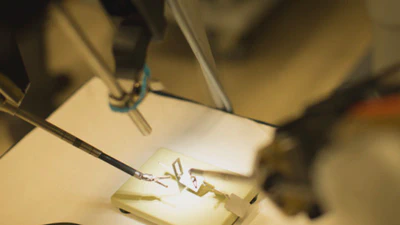
Development of robotic system for performing needle based percutaneous interventions under image guidance.
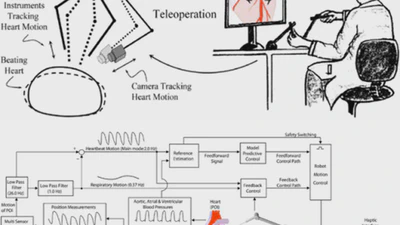
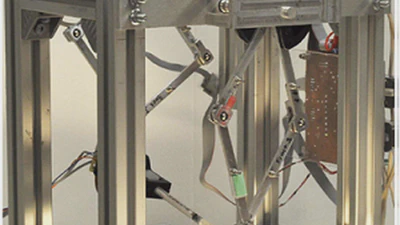
Development of intellignet robotic tools for performing robotic surgery on a beating heart through active relative motion cancellation.
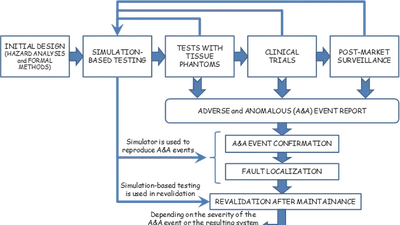
Development of sampling-based methods for empirically assessing safety and reliability of medical cyber-physical systems through data-driven (machine learning) approaches.
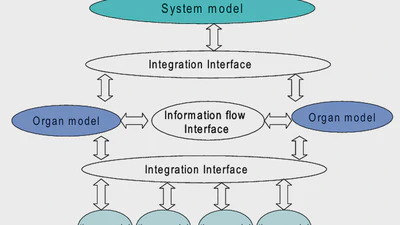
An ontology-based software framework for integration of the multilevel and multiscale models for the complex biological systems.
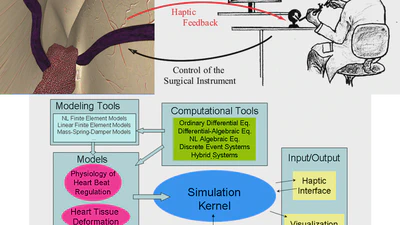
Open source/open architecture framework for developing organ level surgical simulations.
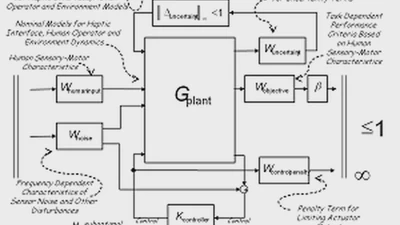
Design and control of haptic interfaces enabling stable, high-fidelity teleoperation in surgical tasks.
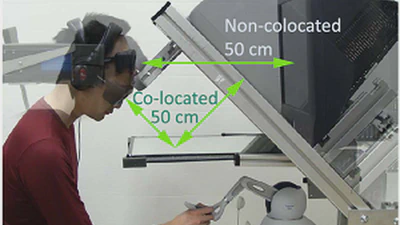
Characterization, modeling, and analysis of human motor performance in haptic manipulation.
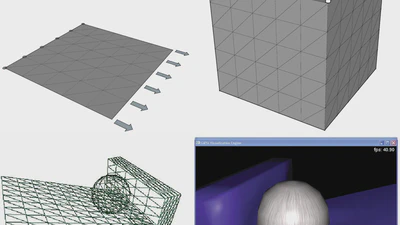
Models and algorithms for real-time simulation of deformable objects in virtual enviroments.