Design of Bilateral Teleoperation Systems
 Design of bilateral teleoperation system using mu-synthesis.
Design of bilateral teleoperation system using mu-synthesis.Goals
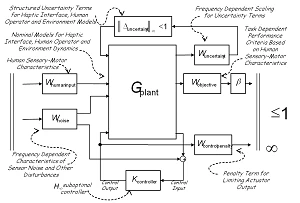
The mechanism and control design of a robotic telesurgery system needs to be done in an integrated fashion to achieve highest fidelity telemanipulation, which is critical since surgery involves very fine and delicate manipulations. However, a quantitative framework that can be used to systematically analyze and evaluate haptic systems in application-critical tasks is not available. As part of this research, we have focused on development of such a framework that will consider the kinematic, dynamic, actuation, and sensory aspects of the system together with the controller design to optimize the performance of the system with respect to application-based performance criteria and human sensory-motor abilities. We have developed a novel quantitative comparison method for haptic systems based on mu-synthesis framework. The method uses the reciprocal of the structured singular value of the system, including the H-infinity sub-optimal controller designed using mu-synthesis technique with the proper uncertainty and performance blocks, as the quantitative index for objective comparison. The method is capable of handling operator, environment, and system model uncertainties, sensor noise, and human sensory-motor abilities.
Highlights
- Research highlights here…
