GiPSi Software Framework for Surgical Simulation
 GiPSi framework overview.
GiPSi framework overview.Goals
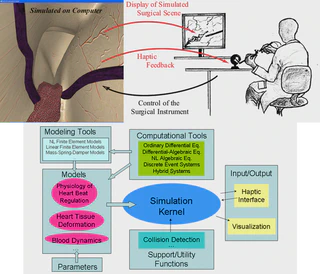
GiPSi is an open source/open architecture framework for developing organ level surgical simulations. Our goal is to facilitate shared development of reusable models, to accommodate heterogeneous models of computation, and to provide a framework for interfacing multiple heterogeneous models. The framework provides an intuitive API for interfacing dynamic models defined over spatial domains. It is specifically designed to be independent of the specifics of the modeling methods used and therefore facilitates seamless integration of heterogeneous models and processes. I/O interfaces for visualization and haptics for real-time interactive applications have also been provided.
We have used the GiPSi framework in house for the development of a virtual neuro-endoscopy training simulator.
Highlights
- Research highlights here…
