Computational Modeling of Human Performance in Haptic Manipulation
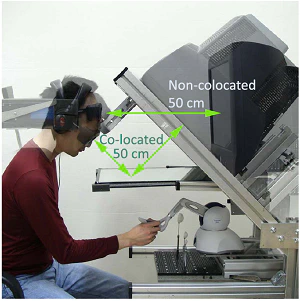 Haptic teleoperation system prototype.
Haptic teleoperation system prototype.Goals
Haptics is a critical form of human interface in interacting with real or virtual environments, as it is the only active sense that can be used in exploring or experiencing an environment. As the user interacts with environments through the haptic system, it alters the user�s perception and motor control, which can affect task performance. Therefore, understanding a haptic system�s effects on the sensory-motor system and the implications of these interactions on task performance is important for the design of effective haptic interface systems. Our research focuses on characterization, modeling, and analysis of human motor performance in the context of stylus-based haptic interface devices, combining human psychophysics experiments with analysis methods from system theory to model and study different aspects of human haptic interaction.
Highlights
- Research highlights here…
