Intelligent Robotic Surgical Assistants: Task Automation in Surgical Robotics
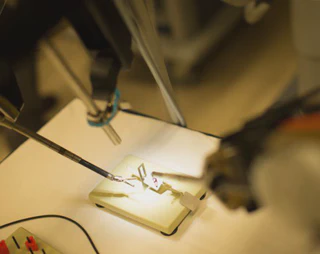 daVinci Research Kit performing surgical manipulation.
daVinci Research Kit performing surgical manipulation.Goals
One of my recent research themes is the development of models, algorithms, and testbeds for realizing intelligent robotic surgical assistants. The goal of this research is make surgical robotic systems to act more like skilled assistants and less like unskilled followers, such that, the surgeon will have high-level interaction with these systems rather than controlling them through low-level direct teleoperation. This will be achieved by providing the robotic surgical systems with low-level task automation capabilities that will enable the system to assist in basic manipulation tasks, such as, retraction, dissection, exposure, and suturing. Such an intelligent robotic surgical assistant will reduce surgeon�s tedium from simple, repetitive tasks; assist her/him in complex manipulation tasks; and reduce cognitive load. Specifically, my research has been focusing on development of robotic perception, planning, and motion control algorithms for autonomously performing surgical suturing and retraction tasks.
Highlights
- Research highlights here…
