MRI-Guided Robotic Catheter
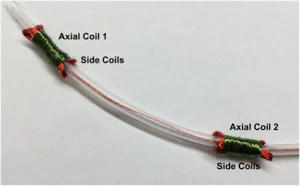 MRI-compatible robotic catheter prototype.
MRI-compatible robotic catheter prototype.Goals
The goal of this project is the development of a robotic active catheter system for performing catheter-based intra-cardiac procedures under real-time inter-operative magnetic resonance imaging (MRI) guidance.
The project synergistically integrates high-speed MRI technologies with robotic motion planning and control techniques to develop a novel co-robotic system.
Specifically, the research focuses on i) development of MRI-compatible robotic catheter prototypes, and algorithms for robotic motion planning and control of active catheter systems; ii) development of algorithms for achieving real-time intra-operative MRI acquisition and image reconstruction; iii) development of advanced human-machine interfaces with real-time interactive 3D visualization; and, iv) hardware realization and experimental validation of the developed technologies.
Highlights
- Project highlights here…
