Robotic Image-Guided Percutaneous Interventions
Jan 1, 2013
·
1 min read
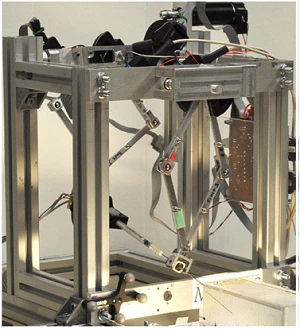 SABiR - Robotic system for image-guided needle-based interventions.
SABiR - Robotic system for image-guided needle-based interventions.Goals
Needle-based percutaneous interventions are widely performed for diagnostic and therapeutic purposes. In such interventions, needle placement accuracy is frequently cited as an important factor in determining the overall outcome the procedure. However, consistently accurate manual needle placement for targets embedded deep inside the tissue is a significant challenge, even under intra-operative image guidance. The robotic tools that will be developed in this project will overcome these difficulties, improving precision and consistency of percutaneous interventions, to reliably perform diagnostic interventions on smaller lesions and to effectively target them for therapy.
Highlights
- Project highlights here…

Authors
Nord Professor of Engineering
M. Cenk Cavusoglu is the Nord Professor of Engineering in Electrical, Computer, and Systems Engineering at Case Western Reserve University. He is also the director of the Medical Robotics and Computer Integrated Surgery (MeRCIS) Laboratory. His research focuses on medical robotics, haptics, human–machine interfaces, and control, spanning control, mechanism, and system design to AI-assisted interventions. He is a Fellow of AIMBE. He has led 12 federally funded projects as principal investigator, with a total budget over $12.6M, and has served on editorial boards for leading robotics and mechatronics journals. His work advances safe, precise, and intelligent robotic systems for surgery and image-guided interventions.