Millimeter-Scale Robotic Tools for Minimally Invasive Surgery
Jan 1, 2008
·
1 min read
 Robotic tools for minimally invasive surgery.
Robotic tools for minimally invasive surgery.Goals
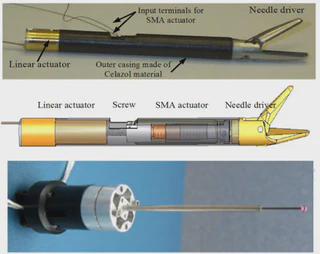
Design of the robotic mechanisms for minimally invasive surgery is one of the thrust areas of our research. In addition to the development of a tele-surgical robotic system for beating heart surgery (described above), our research also focuses on development of miniaturized actuation and sensor systems that can be used as enabling technologies for robotic systems for minimally invasive surgery. Examples include, an integrated hybrid actuator system that combines shape memory alloy and DC motor actuators, and a whisker sensor to detect the relative motion between the surgical instrument and the heart.
Highlights
- Project highlights here…

Authors
Nord Professor of Engineering
M. Cenk Cavusoglu is the Nord Professor of Engineering in Electrical, Computer, and Systems Engineering at Case Western Reserve University. He is also the director of the Medical Robotics and Computer Integrated Surgery (MeRCIS) Laboratory. His research focuses on medical robotics, haptics, human–machine interfaces, and control, spanning control, mechanism, and system design to AI-assisted interventions. He is a Fellow of AIMBE. He has led 12 federally funded projects as principal investigator, with a total budget over $12.6M, and has served on editorial boards for leading robotics and mechatronics journals. His work advances safe, precise, and intelligent robotic systems for surgery and image-guided interventions.