MRI-Guided Robotic Catheter
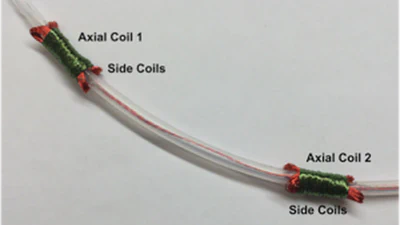
MRI-guided robotic catheters for intravascular cardiac procedures.
•
1 min read
My research is in the general areas of robotics, human-machine interfaces, and control/systems theory with special emphasis on medical robotics and haptics. Specifically, my research has focused on design of medical robotic systems for minimally invasive surgery and image-guided interventions, haptic interfacing in teleoperation systems and to virtual environments, and virtual environment-based surgical simulators. Some of the specific research topics I have worked on include:
MRI-guided robotic catheters for intravascular cardiac procedures.
Robotic motion planning, perception, and control algorithms for automating subtasks in surgery.
MRI-guided robotic catheters for intravascular cardiac procedures.
Robotic motion planning, perception, and control algorithms for automating subtasks in surgery.
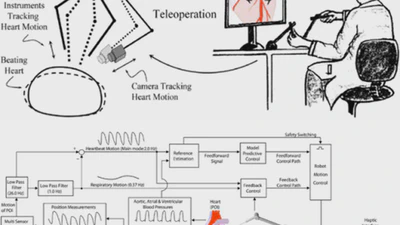
Development of intellignet robotic tools for performing robotic surgery on a beating heart through active relative motion cancellation.
Development of robotic system for performing needle based percutaneous interventions under image guidance.
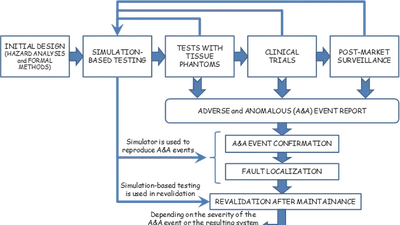
Development of sampling-based methods for empirically assessing safety and reliability of medical cyber-physical systems through data-driven (machine learning) approaches.
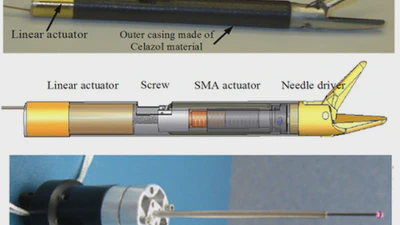
Development of millimeter-scale robotic tools for minimally invasive surgery.
Characterization, modeling, and analysis of human motor performance in haptic manipulation.
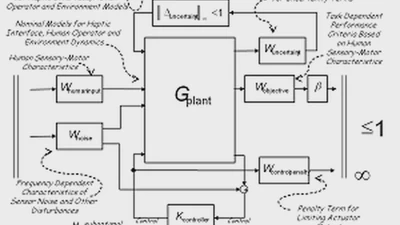
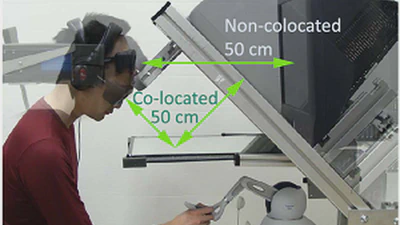
Design and control of haptic interfaces enabling stable, high-fidelity teleoperation in surgical tasks.
Algorithms for high fidelity haptic interfacing to virtual enviroments.
Open source/open architecture framework for developing organ level surgical simulations.
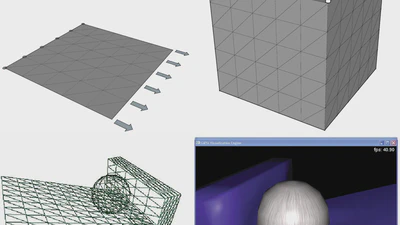
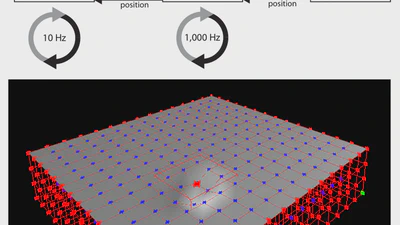
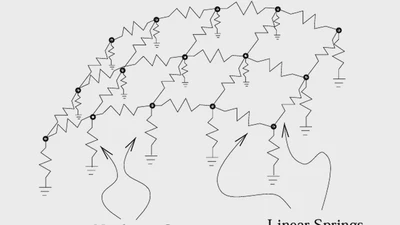
Models and algorithms for real-time simulation of deformable objects in virtual enviroments.
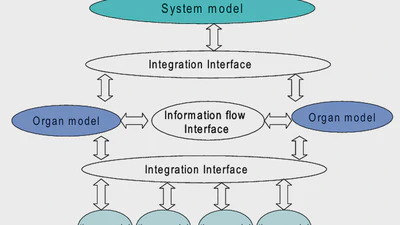
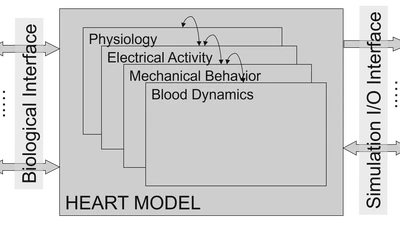
An ontology-based software framework for integration of the multilevel and multiscale models for the complex biological systems.
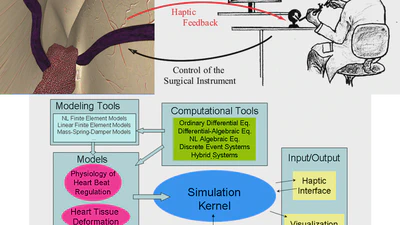
My PhD thesis at UC Berkeley was “Telesurgery and Surgical Simulation: Design, Modeling, and Evaluation of Haptic Interfaces to Real and Virtual Surgical Environments.” My PhD advisor was Prof. S. Shankar Sastry, and my co-advisor was Prof. Frank Tendick. After my PhD, I stayed as a postdoctoral researcher / specialist with the Medical Robotics group at UC Berkeley, Dept. of EECS. During my PhD and postdoctoral studies, I worked on the following projects:

Robotic motion planning, perception, and control algorithms for automating subtasks in surgery.
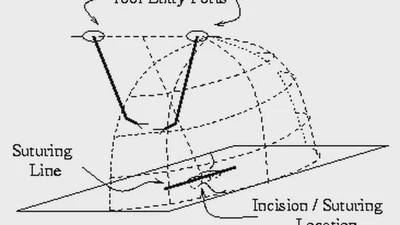
Method to evaluate the kinematic ability of surgical robotic manipulators to perform suturing and knot tying.
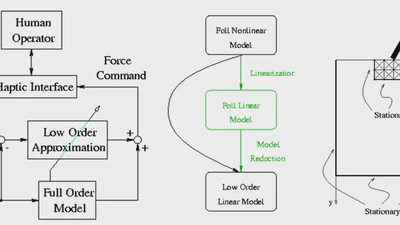
Bilateral force feedback teleoperation controller design for haptic exploration and telemanipulation of soft environments.
Development of virtual environments for in surgical training simulators.
Development of a multi-rate simulation scheme for haptic interaction with virtual environments.
Organ level modeling and simulation for surgical applications.
Modeling the dynamics of human-thigh for development of an echography simulator with force feedback.
Modeling of robot-environment contact and force control as a hybrid-system.
My graduation project at METU was “Closed Loop Position and Force Control of Anthrobot III Robot Hand,” which was supported by Ankara Electronics Research and Development Institute of Turkish Scientific and Technical Research Council, under project number 95-20-100. My project advisor was Assoc. Prof. Dr. Aydan Erkmen.