Intelligent Robotic Surgical Assistants: Task Automation in Surgical Robotics
Robotic motion planning, perception, and control algorithms for automating subtasks in surgery.
•
1 min read
Robotic motion planning, perception, and control algorithms for automating subtasks in surgery.
Development of robotic system for performing needle based percutaneous interventions under image guidance.
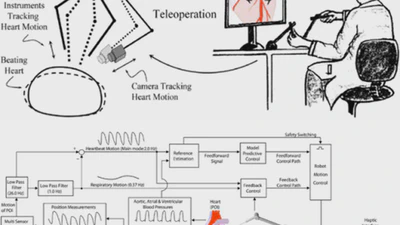
Development of intellignet robotic tools for performing robotic surgery on a beating heart through active relative motion cancellation.
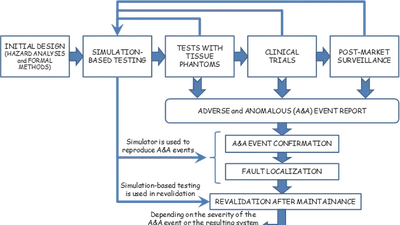
Development of sampling-based methods for empirically assessing safety and reliability of medical cyber-physical systems through data-driven (machine learning) approaches.
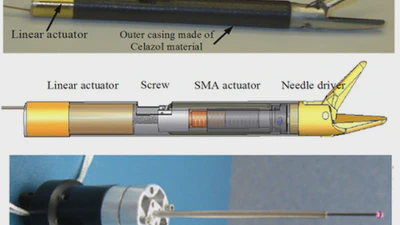
Development of millimeter-scale robotic tools for minimally invasive surgery.

Robotic motion planning, perception, and control algorithms for automating subtasks in surgery.
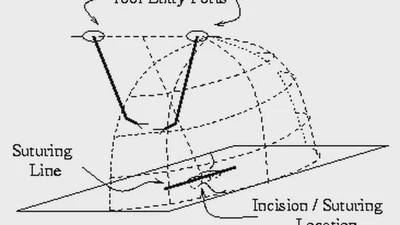
Method to evaluate the kinematic ability of surgical robotic manipulators to perform suturing and knot tying.