Design of Bilateral Teleoperation Systems
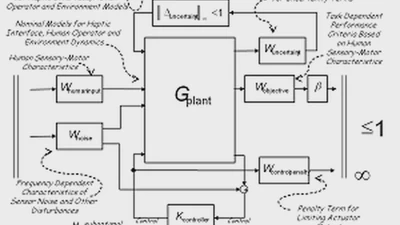
Design and control of haptic interfaces enabling stable, high-fidelity teleoperation in surgical tasks.
•
1 min read
Design and control of haptic interfaces enabling stable, high-fidelity teleoperation in surgical tasks.
Characterization, modeling, and analysis of human motor performance in haptic manipulation.
Algorithms for high fidelity haptic interfacing to virtual enviroments.
Bilateral force feedback teleoperation controller design for haptic exploration and telemanipulation of soft environments.